#include <dynamics.hh>
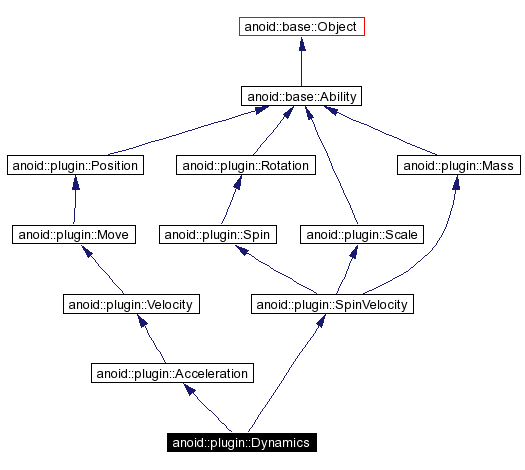
Inheritance diagram for anoid::plugin::Dynamics:
Public Methods | |
| virtual void | init (config::Configuration &c) |
| virtual void | update () |
| virtual void | redraw () |
| virtual base::Object * | add (base::Object *o) |
| virtual void | receive (base::Message *m) |
| Dynamics () | |
Protected Attributes | |
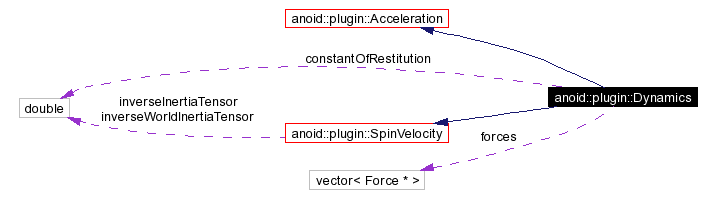
| std::vector< Force * > | forces |
| double | constantOfRestitution |
Definition at line 19 of file dynamics.hh.
|
|
Definition at line 29 of file dynamics.hh. References constantOfRestitution. |
|
|
Definition at line 53 of file dynamics.cc. References forces. |
|
|
This is the real initialiser. It should take it's parameters from the provided configuration
Reimplemented from anoid::plugin::Acceleration. Definition at line 40 of file dynamics.cc. References constantOfRestitution, and anoid::base::Ability::registerName(). |
|
|
|
Called just after update has been called on the entire world. This should draw the objects (using OpenGL). Reimplemented from anoid::plugin::SpinVelocity. Definition at line 34 of file dynamics.cc. |
|
|
Called when the main loop is ready for another step. Should be used to perform any calculations prior to movement. Reimplemented from anoid::plugin::Acceleration. Definition at line 15 of file dynamics.cc. References anoid::plugin::Acceleration::acceleration, forces, anoid::base::Object::getWorld(), anoid::simple::i(), anoid::plugin::Mass::mass, anoid::simple::O(), anoid::plugin::SpinVelocity::spinvelocity, and Vector(). |
|
|
Definition at line 22 of file dynamics.hh. Referenced by Dynamics(), init(), and receive(). |
|
|
Definition at line 21 of file dynamics.hh. |